
多年以来,Nanotec Electronic GmbH & Co. KG 一直在为高等院校和职业学院的科研项目提供产品和专业技术支持。要获得资金支持的科学项目应当满足下列条件:在课题/内容方面具有创新性,符合科学工作的方法,能对社会产生积极作用。
Nanotec 支持 Deutschlandstipendium(德国奖学金计划)
自 2011 年夏季以来,Deutschlandstipendium 为成绩优秀并献身科学的学生提供每月 300 欧元的资金支持。该奖学金采用公私合作原则,由企业、基金会或私人来赞助青年人才,每月承诺支付 150 欧元。而联邦政府将配套给予另外的 150 欧元。但在更多情况下:许多大学和私人赞助商也会通过并行的辅导项目、交流活动和实习机会来支持德国的奖学金获得者。 我们认为,科学人才是德国未来经济发展的中流砥柱,为他们提供支持是我们义不容辞的责任。因此,Nanotec Electronic 成为 Deutschlandstipendium 的资助商之一。2017 年 Deutschlandstipendium 颁奖现场 照片:Andreas Heddergott

受到资金赞助的项目

ANELISE 智能土壤分析
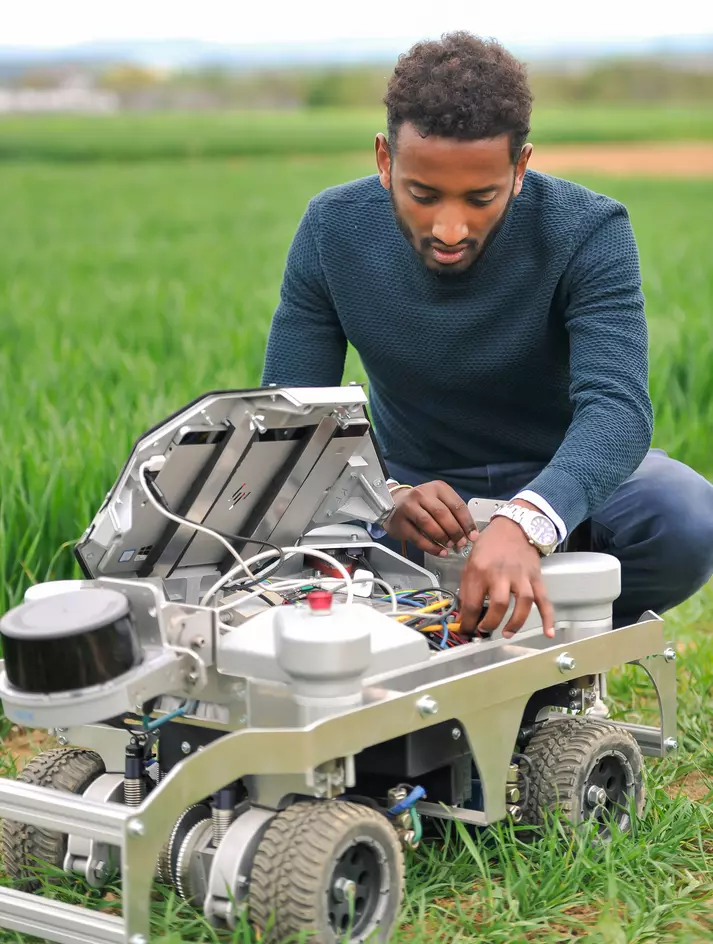
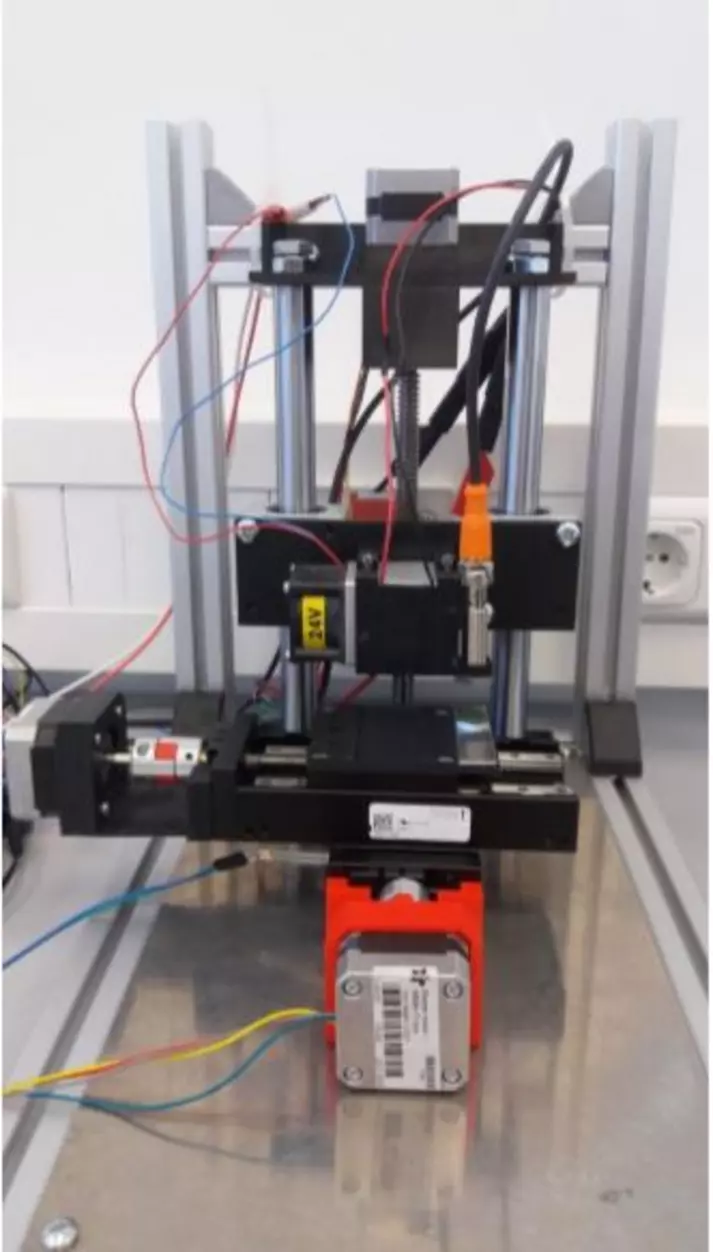
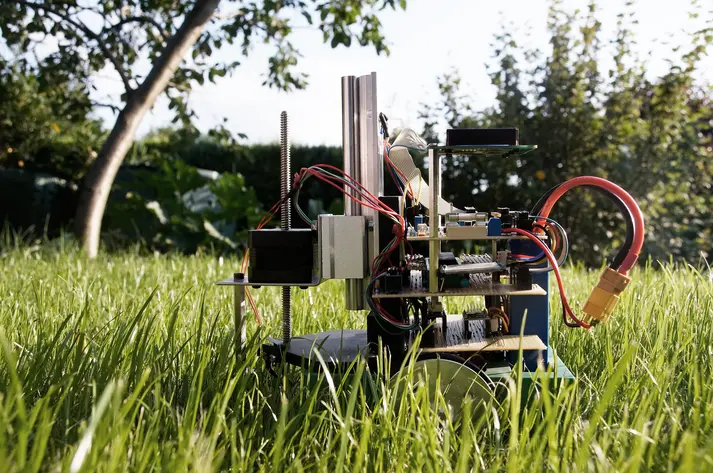
雷根斯堡OTH(OTH Regensburg)的ELISE项目旨在智能地自动化土壤样本分析过程。学生们专注于优化采样流程,因为先前采用的“蛮力”方法常常会导致提取物受到污染,进而产生不准确的测量结果。
现在,在自主机器人的协助下,取样过程变得更加轻柔。ANELISE在预设点位抽取样本,从相同的深度提取,而且不会引入死微生物或外来物质。
Nanotec通过提供DB59无刷直流电机, GPLE40精密行星齿轮箱 以及 CL4控制器/驱动器来支持该项目。这套组合确保了以最小的功耗实现精确的采样,并为用户提供所有数据的实时控制。
(来源和照片:Michael Fellner)

网球场升级改造
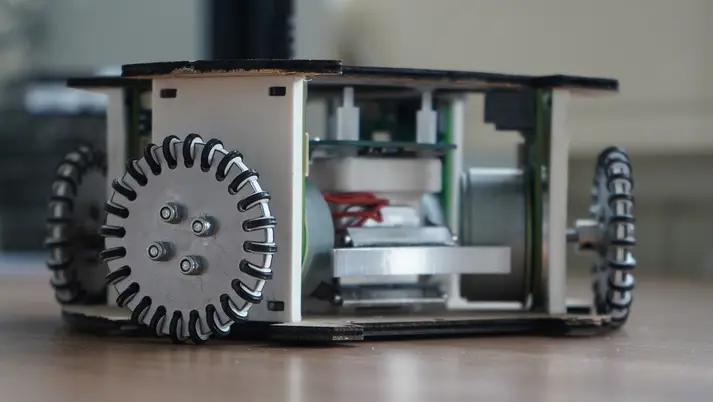
HTL Rennweg 的学生们开发了一种可在网球场上拉动拖沙网的机器人。按下按钮,“Court Bot”便会自主移动、均匀布沙并抚平凹凸不平之处。
为了覆盖整个区域,机器人配备了零转轮。其可抬起拖沙网并旋转 90 度,最大限度减少拖沙网的工作宽度并使其能够绕开障碍物以到达每一个角落。
为了完成该项目,Nanotec 为学生们提供了多个组件,包括 SCA5618 步进电机, 带集成控制器的 PD6 直流无刷电机, 以及 GPLE60 精密行星齿轮箱.
(图片来源:Alexander Heim)




在通向成功的道路上,KA-RaceIng 砥砺前行
卡尔斯鲁厄理工学院(Karlsruhe Institute of Technology)以“KA-RaceIng”的名义在学生方程式比赛中处于领先地位。学生们的目标是利用新开发的自主单座套件 KIT23 继续他们的成功之路。
发挥核心作用的是:无刷直流扁平电机 DFA90 和高性能控制器/驱动器 C5-E-2。由 Nanotec 赞助的这些产品,以及由 KA-RaceIng 开发的传动系统,确保精确和快速的转向,满足学生方程式比赛的苛刻要求。车队对 KIT23 寄予厚望,其目标是不仅要确保这次登上冠军领奖台,还要在接下来的赛季中有所作为!
(来源和照片:Simon Enderle)

使用 Os.cart 可轻松进行电池运输
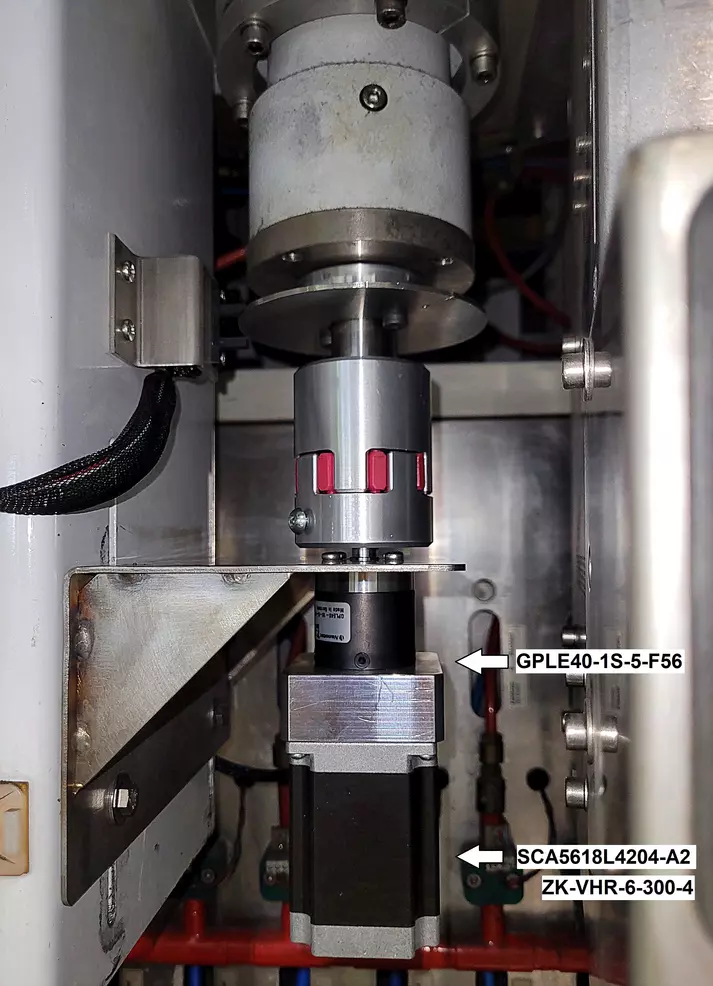
来自 FH Campus Wien 的 OS.Car 赛车队经常面临将重达 100 公斤的赛车电池抬起并运送到充电站的任务。为了简化这一过程,他们现在推出了名为“Os.cart”的官方运输车,这是作为 HTL Rennweg 毕业论文的一部分开发的。
它的工作原理是这样的:Os.cart 通过一个由螺杆驱动、高度可调的剪刀装置向上移动,直到与赛车驾驶舱处于同一高度。通过这种方式,可以方便地拆卸和安装电池,同时 Os.cart 提供符合人体工程学的支撑,只需极小的力气。
Os.cart 采用了 Nanotec 的多个组件,包括 ST6018 步进电机, WEDL 编码器, GP56 行星齿轮 和 C5-E 控制器.
(来源和照片:Kerstin Preisl)
Octa-Mix—完美的混合
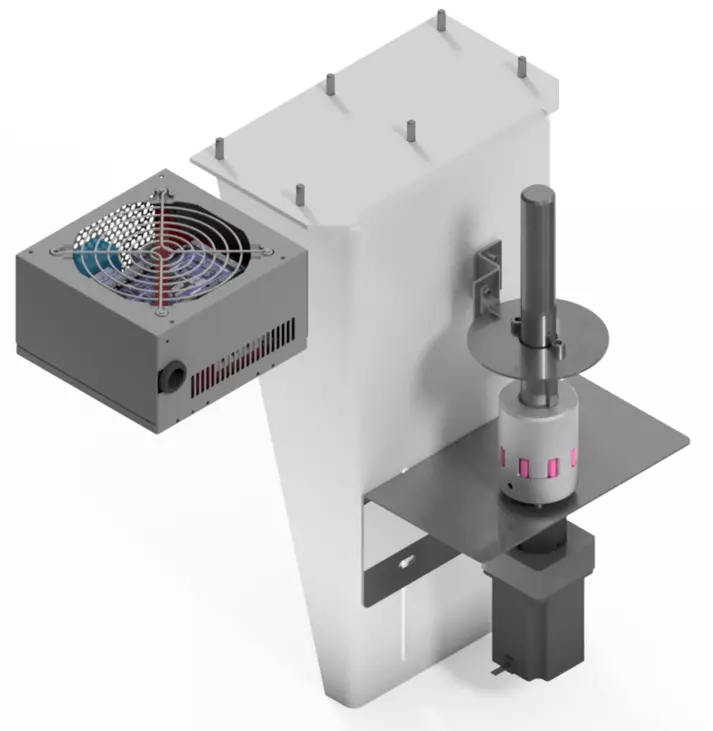
新产品“Octa-Mix”可为您调配最完美的混合饮料,这款产品由 HTL Rennweg 的学生构建。该设备可根据具体要求将不同的液体进行混合,且调制迅速,美味无需久等。
用户可通过触摸屏或 Android 应用定义混合比例。Octa-Mix 包含八个饮料槽,能够处理复杂的配方,包括各种液体,如水、糖浆或浓缩液。通过使用一个蠕动泵系统,可确保精确的剂量进给。该系统由九个 ST4118 s步进电机控制,这些电机由 Nanotec 提供,作为大学项目资金的一部分。
(来源和照片:Fabian Gutruf)



RoundT – 透明的饮水机系统
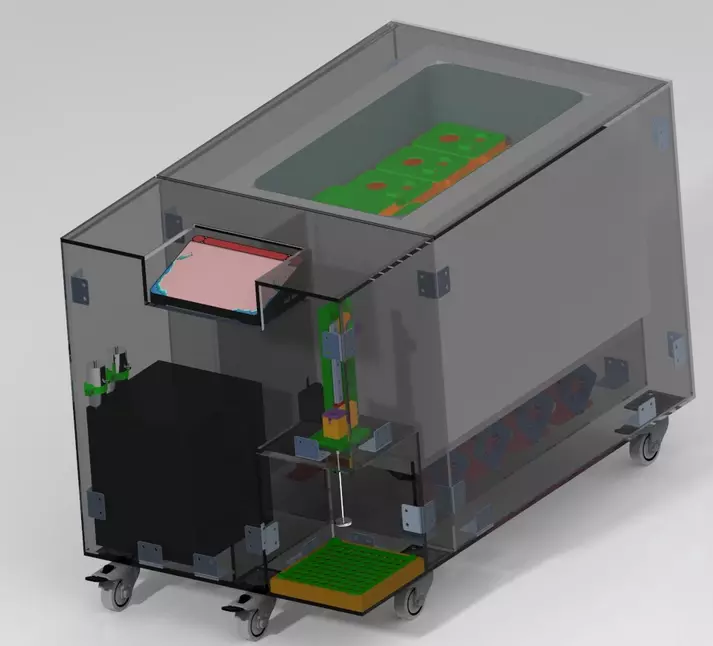
RoundT 是由来自 HTL Rennweg 的四名学生开发的。正如 RoundT 的名字所暗示的那样,其相关设备是一个圆桌。
桌子的内部有一个冷藏室,里面包含六个饮料容器,每个容器的容量为四升。该腔室能够在 20 分钟内将饮料冷却至 14°C。
内部部件通过程序上下移动“电机 + 齿轮 + 丝杆”构成的组合件。为此,Nanotec 提供了 ST5918L2008-B 步进电机。它驱动一个齿轮,通过该齿轮移动丝杆以及所连接的内部部件。要打开饮料时,只需将杯子放在八个阀门(自制)中的一个上面,然后通过应用程序选择所需的饮料。通过透明的桌面,用户可以看到管道系统如何从下面向杯子中加注饮料。
(来源和照片:Dominik Michalski / Niklas Eichelberger)

太阳能船
Técnico Solar Boat 是一个大学项目,由一组参加 Instituto Superior Técnico 工程设计课程的学生组成。本赛季,他们正在制作第二艘船,SR02。SR02 长 6m,宽 2m,而且还将更轻、更快,且更高效。为了实现设定的目标,这个团队正在研制一个水翼船系统,可将船从水中抬起,以减少牵引力。学生们为此设计了一个水翼击打角度电子控制装置。这个控制装置采用了传感器和执行器,这些执行器来自于 Nanotec。该项目组采用的三个步进电机,都通过N5-1-2 控制器进行控制,其中安装了NOE2 编码器用于了解水翼船的准确位置。这些产品具有的详细数据表和 Plug and Drive Studio 软件为团队提供了帮助,他们可以由此尝试所有不同的运行模式,以及轻松设置所有需要的参数。来源和照片:Sebastião Beirão
自动田间机器人
自动田间机器人
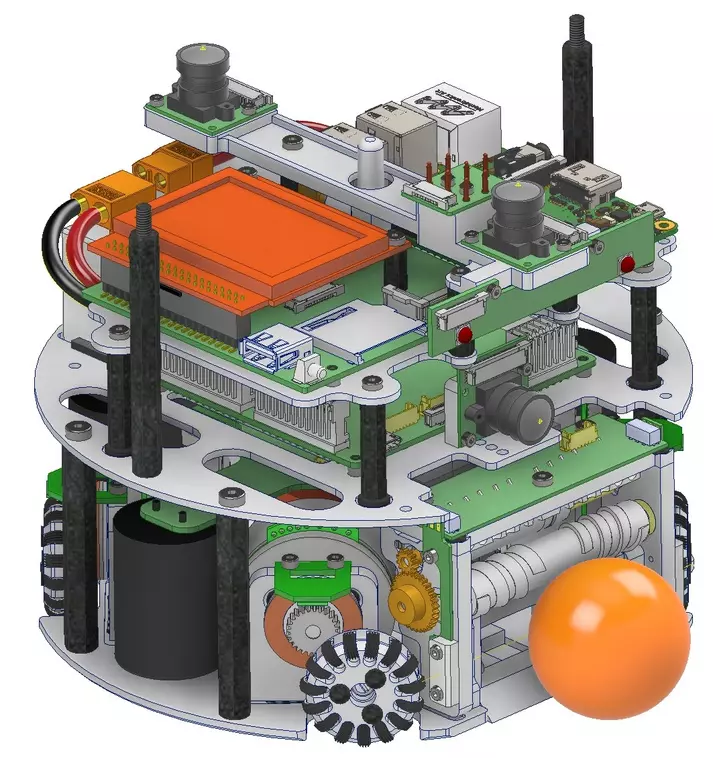
霍恩海姆大学目前正在研究未来应用于农业的自动田间机器人。为此,一支学生队伍定期参加“田间机器人大赛”。该年度的机器人竞赛目标是让小型机器人自主执行农业中耗时且无利润的各种任务。
有了 Nanotec 的支持,新机器人“Goliath”的编程和搭建才能成为可能。该机器的设计使其能够在成排的植物间行走,并用于在田间执行自主监控或小型操作任务。
Goliath 采用了配备 PD4-C5918M4204 和 PD6-N8918S6404 电机的单轮转向系统和单轮驱动。电机的控制由 ROS(机器人操作系统)和 CANopen 完成。激光扫描仪和摄像头帮助机器人检测其身处的环境。
(来源和照片:Jonas Esterl / Dr. sc. agr.Dipl.-Ing.David Reiser)
分拣机器人
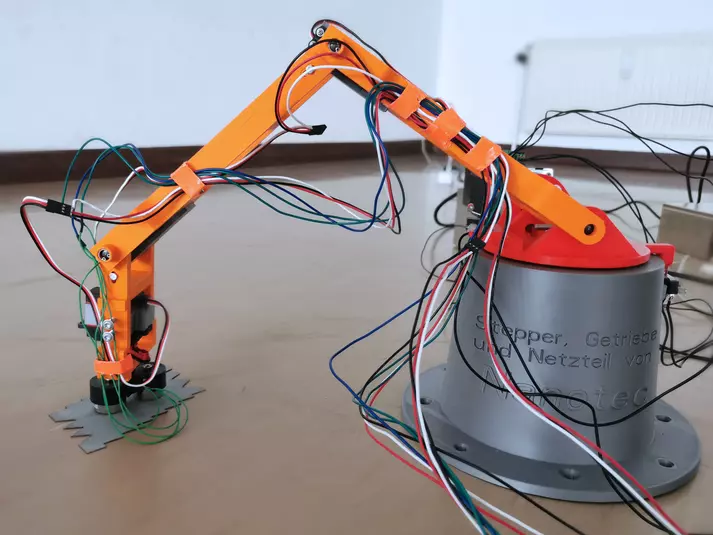
来自 HTL Rennweg 的一支学生队伍搭建了一个具有五个旋转轴的分拣机器人。该机器人可拣起物体并将其放置在另一个位置。
为使机器人移动,该队伍在两个主轴上使用来自 Nanotec 的两个带集成控制器的 PD4-C6018L4204-E-01 电机和 GP56-S1-3-SR 高转矩行星减速箱。
该机器人十分灵活并已装配电磁铁,用于抓取无法通过磁力拎起来的部件。该队伍在其他三个轴上安装了轻量级的建模伺服系统。
(来源和照片:Silas Amesmann)
电动自行车测试平台
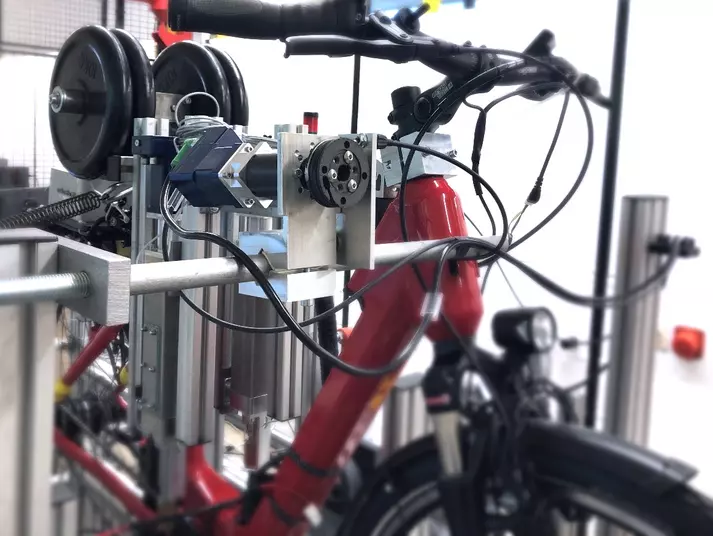
电动自行车不再是某一特定人群使用的小众产品。因此,对于高品质电动自行车的需求早已持续增长。为了确保电动自行车在生产过程中的确保一贯的高品质,阿伦大学研发出了一套测试平台,可将自行车作为一个完整的系统来对其质量进行测试。而在此之前,这些测试大多局限于零部件层面,只能在一定程度上反映实际使用情况。
该试验台的独特之处在于它能够1:1 再现人类的蹬踏行为。该仿通过对电机驱动扭矩的智能正弦控制,实现模拟骑行者蹬踏时的摇摆运动。
自行车骑手的换挡行为由Nanotec的 PD2-N4118L1804-IP-2 (NEMA 17规格)步进电机模拟实现。换挡线缆通过一个卷轴与电机相连,当电机运转时,能够模拟骑手操作换挡的动作。
来自机械工程与材料科学学院的团队使用 Nanotec 自研的 NanoPro 软件,将这款带集成控制器的步进电机进行整合,并通过个人电脑对其实施控制。
(来源和照片:Özben Sarikurt)
卫星跟踪地面站
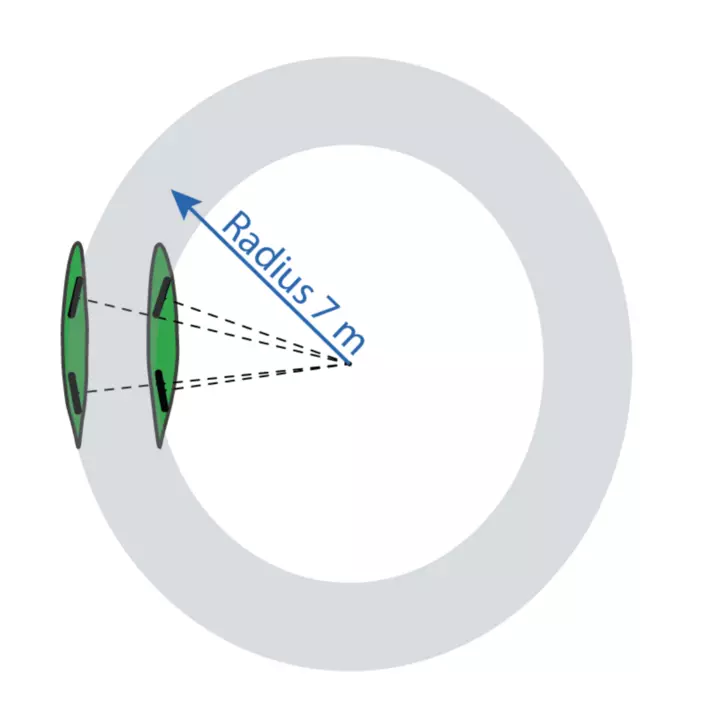
达姆施塔特工业大学的空间技术e.V.小组是一个获得认证的大学团体致力于推动学生层面的空间研究。自成立以来,这个由35名学生组成的团队一直在研发一颗小型卫星,即所谓的立方体卫星(CubeSat)。
卫星任务的目标是展示有助于减少太空垃圾风险的创新技术。为了与立方体卫星(CubeSat)进行通讯,团队构建了一个地面站,该地面站通过精确对准天线来实现无线电联系。天线的追踪定位由两个轴完成,这两个轴由Nanotec的防护等级为IP65的 AS5918L4204-EB 步进电机驱动。为了达到所需的扭矩,团队采用了精密行星齿轮箱 GPLE60-2S-32,以确保追踪的精准度和可靠性。
(来源和照片: Fabian Burger)

机场的自动测光
“relight”项目是由奥地利维也纳 HTL Rennweg 大学的四名学生开发的一种测光装置。机场滑行道上安装的灯具需要定期检修以满足要求并确保达到所需的安全水平。因此,该装置从不同位置测量它们的亮度。由于有些灯具没有安装在插座中间,必须通过机械方式补偿偏移。Nanotec 的 LA421S14-A-UKBN 贯通式直线步进电机可自动精确地满足这一要求。
该测量装置用于奥地利的小型机场,因为它是市场上现有型号的良好替代品。
(来源和图片:Matthias Gerber)

赛车自动转向系统
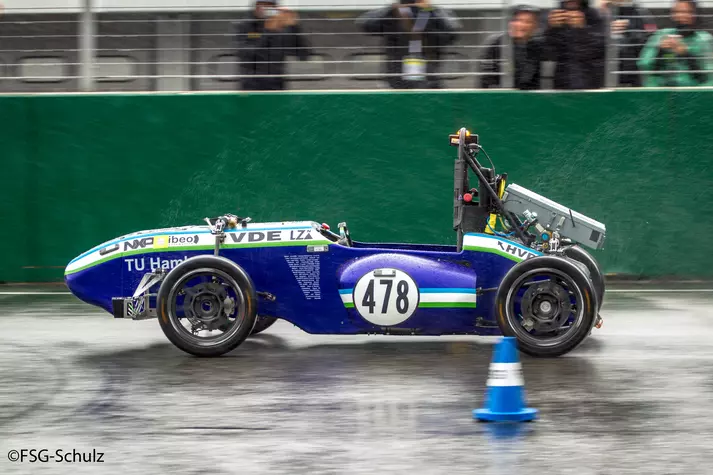
汉堡理工大学 (TUHH) 的 e-gnition Hamburg 团队自 2011 年以来一直在打造电动赛车。该团队由约 60 名学生组成,并成功地定期参与世界最大的工程竞赛“学生方程式赛车”(Formula Student)。在 2020 年赛季,该团队首次采用组合设计理念设计的同一辆车在无人驾驶和电动两项比赛中参赛。
该赛车的自动转向系统使用多种电机和控制器,得益于 Nanotec 先进运动控制技术,使得赛车能够持续稳定在赛道上。在 2021 年赛季,学生们使用 CL4-E-2-12 电机控制器来驱动安装在转向轮上的电机,该控制器像驾驶员一样转动方向盘。
进一步的技术信息以及照片可以在 https://en.egnition.hamburg/ 找到
(来源和照片:Ole Ramming)

火星探测器
STAR Dresden e.V. 是德累斯顿工科大学 (TU Dresden) 的一个致力于宇宙飞行的学生工作团体。它由大约 30 名来自多个学位课程的成员组成,包括工程、物理学和医学。该团体开发了一台火星漫游车,并使用它来参与在波兰举行的欧洲漫游车挑战赛 (ERC),在该赛事中,来自世界各地的学生团队用自己建造的漫游车相互比拼。
Star Dresden e.V. 建造的火星漫游车名为 ELECTRA(远征轻型采掘收集运输辅助车)。该车旨在模拟火星上的使用,以及在模拟的火星表面,协助宇航员。该团队驻扎在一个单独的帐篷中,并远程控制漫游车。漫游车要执行的任务包括采集泥土样本、拍摄照片、操作控制面板上的开关和连接大电流插头等,一切都在非常狭窄的空间中尽可能自动地进行。此外,该漫游车必须使用二维码来定向,并且必须按照复杂地形上的指定路线行驶。
该漫游车使用四个轮子来移动。轮子可以沿其纵轴实现近 360° 度转动。为了使漫游车转向,该团队安装了一个 DF45L024048-C2 直流无刷电机,以及一个 GPLK42-56 轻量级行星减速箱。驱动器则采用 DF45L024048-A2 直流无刷电机以及一个 GP42-S2-46-SR 高转矩行星减速箱。
(来源和照片:Elias Ortlieb)

自动驾驶拖车
Rudolf-Diesel 工程师技术学校位于德国纽伦堡,该学校的“E-Trailer”项目小组计划、设计并制造了一台自动驾驶拖车。为了实现自动驾驶,E-railer 在后轴上装有属于自己的电驱动器。前轮也由电动机驱动,用于转向。该拖车能够自动转向、刹车以及保持距离。
该项目团队由四人组成,为了操纵前轴,他们需要一台直流电压 (24 – 48 V) 步进电机。团队选择了 Nanotec 的PD4-C5918M4204-E-01带集成控制器的直流无刷电机和 GP56-S1-7-SR 高扭矩行星变速箱。
(来源和插图:Sebastian Blank, Maximilian Lenk, Andreas Ortner, 和 Philipp Geitner)

自动香料架
在 SIA 项目的范围内(学生工程学院),Rosenstein 高中的学生计划、设计并成功制成了一款自动香料架。通过微控制器 (Arduino) 进行控制,它能够自动移至货架隔间并通过小窗口对那里的容器进行分配。由于使用了 Nanotec 的步进电机(1xST8918L4508-B,ST5918S1008-A和ST4118L1206-A),学生们能够以最佳方式实现自动香料架的移动理念。来源和照片:Jens Gruber

自主转向系统
全球方程式赛车队是一支来自拉文斯堡巴登-符腾堡州立合作大学 (DHBW) 和美国俄勒冈州立大学的国际赛车队。学生们协力合作打造了两辆赛车,并参加多场国际比赛,与来自 500 多个大学的其它车队一较高下。 尽管设计仍然相对较新,但在霍根海姆赛道的德国大学生方程式车赛和巴塞罗那-卡塔伦亚赛道的西班牙大学生方程式大赛中,来自 DHBW 拉文斯堡的团队仍取得了不错的成绩。 在赛车制造过程中给,团队遇到了众多必须克服的挑战,其中之一是转向系统的构造和设计。该系统需要满足在赛道上使用的要求。Nanotec Electronic 为赛车提供了用于转向的电机,两台PD6-CB87S048030-E-098。借助这种直流电机,使功能车在自动驾驶模式下具有人类驾驶员的转向行为成为可能。来源和照片:Marko Bausch

自动转向系统
High-Octane Motorsports e.V. 的无人驾驶团队来自University of Erlangen-Nuremberg 大学,他们在一年的时间内使一辆标准的小型赛车摇身一变,成为一辆自动驾驶汽车。尤其是为其配置了额外的传感器、计算单元和电动执行器,用以对车辆进行控制。被动制动系统通过步进电机的控制进行启动。为此,该团队选择使用了 Nanotec 的步进电机ST4118D1804-B。对于转向系统等其它重要组成部分,每个部分在敏捷性、力和可靠性方面均需达到很高的要求,因此该团队使用了带GPLE60-1S-8变速箱的步进电机ST6018L3008-A。从而可以实现高性能和空间优化的设计。资料来源:Richard Stierstorfer
踢球机器人
在位于曼海姆的巴登符登堡州立合作大学 (DHBW),TIGER 团队人员正在进行小型踢球机器人的开发,将参加 RoboCup 联盟的年度世界锦标赛。这些机器人都是根据图纸独立完成制作,而且在踢球时完全没有人工干预。在最近几次世界锦标赛上,曼海姆的 Tiger 团队成员被授予“优秀奖”,以表彰其出色的科研成果和整体成绩。第四代机器人,电机更换为功率更强劲的设计:65 W,DF45L024048-A2 尤其适合用于此项用途,因为安装空间有限,使用更小的 A2 规格连接板将带来很大的不同。来源和照片:Andre Ryll
3 轴精密定位系统
在位于 Iserlohn 的南威斯特法伦应用科技大学 (FH Südwestfalen),一名学生开发出了采用 3 轴精密定位系统的微型定量器。这个微型定量器采用了创新的液体定量方法,可进行极小量的分配定量。由于液体不是通过空心针进行定量,定量器不依赖于液体的粘稠度。同时还省去了经常进行的清洁步骤。该微型定量器采用了Nanotec C5-01 开环步进电机控制器。来源和照片:Aingharann Pathmanathan

采用可编程逻辑控制器的逆向钟摆
在纽伦堡理工学院 (Technische Hochschule Nürnberg),学生们设计出了一个采用可编程逻辑控制器的逆向钟摆。固定的钟摆杆可以在其连接点自由旋转。通过支承点受控的来回移动,摆杆可以固定在竖直状态,并实现干涉影响的补偿效果。因此,控制任务是将钟摆杆在其竖直、不稳定的平衡位置点保持稳定。采用线性轴移动钟摆杆的连接点。NanotecAS5918L4204-ENM24步进电机和N5-1-1电机控制器作为驱动系统使用。使用闭环技术具有许多优势:
- 电机运行更顺畅
- 加速更快
- 定位更为精确
- 电机发热量更少
来源和照片:Simon Northoff

无人驾驶汽车
“Formula Student” 是面向全球的设计竞赛,参与者为来自世界各地的大学生,每组各自展示一款方程式赛车的概念原型。今年,Formula Student 的“Sapienza Corse”团队 (“La Sapienza” – 罗马大学)尝试在其 “Gajarda AWD” 汽车上安装一个 ETC 系统。通过电子节流控制装置,当驾驶员并不是专业车手时,可以提供更为便捷的可驾驶性。此外,还可以显著改善车辆运行效率。步进电机ST2818L1404-A是整个系统的关键构件:具有节流阀的安全性和精准度,同时不会影响反应迅捷度和车体重量。电机还提供了足够的转矩,从而无需使用大规格的变速系统。

操纵杆发出的力反馈
凯赛尔大学的学生萌发了制造一个 Fieseler Storch 飞行模拟器的想法。这个模拟器的最新版本采用了 180° 视角的屏幕,飞行员可以真实模拟一架 1936 年生产的螺旋桨驱动的飞行器。随后将集成一个触控式操纵杆,用于模拟作用于方向舵和襟翼的力。在设计反馈电路时,采用了 Nanotec 生产的两台步进电机 (PD4-C6018L4204)。作用力通过齿形带进行传输,减速比为 1:5。来源和照片:Daniel Strawe

一个由来自奥格斯堡大学的六名学生组成的团队,设计并制造了一款可以为“Fritz-Felsenstein 之家”绘制彩色图案的机器。这个地方是残障人士的家。“涂料弹射器” 项目采用了 Nanotec 的ST8918M6708-B 高转矩步进电机,用于驱动旋转盘。学生们在盘上安装了一块纸板,涂料通过线性输送装置和泵机元件滴落到盘上。旋转力将涂料滴液导向外侧,从而根据速度和施力位置,生成独特的图案。在设备启动后,可通过触摸显示屏设置速度。屏幕上的三个按钮用于选择颜色、主轴位置以及涂覆涂料,让设备操作轻松方便。来源和照片:Patrick Lebmeier
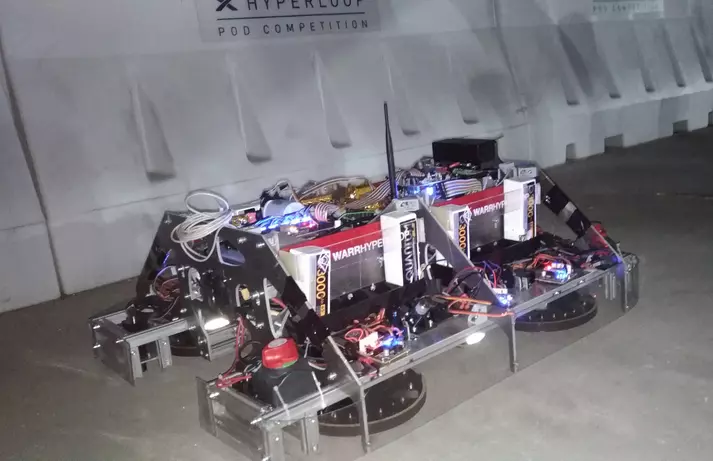
来自慕尼黑大学的 WARR Hyperloop 团队制造了一个浮动容器。通过四个直线步进电机将容器提起,以启动悬浮驱动装置。其中采用了四台尺寸规格为 NEMA 14 的 Nanotec L3518S1204-T6X1-A25 直线步进电机。当驱动装置旋转后,"Nanotec 支脚" 将通过磁力自动收起,并使容器悬浮。可以运输最大 50 kg 的有效负载。来源和照片:Domenik Radeck
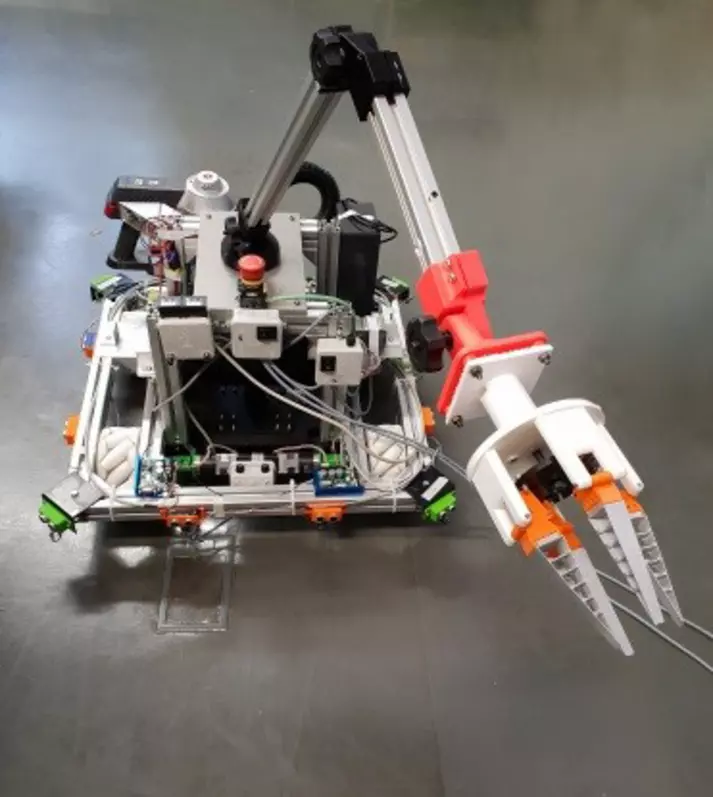
在 2017 年夏季学期,慕尼黑大学的学生制作了一个可以独立移动和吸尘的家务机器人。这台机器人具有一个抓臂,用于抓取和运输物体。这些学生们在机器人的手臂中安装了一个 Nanotec 生产的尺寸规格为 NEMA 23 的高转矩步进电机 ST5918L2008-B 和蜗轮GSGE60-25-1。来源和照片:Philipp Heckenmüller
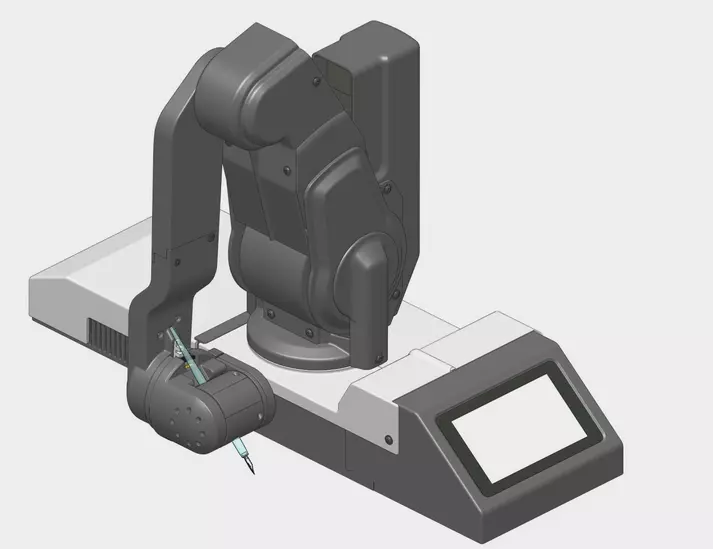
学生项目“手稿书写者”涉及一个可以模仿人类手写的机器人。机器人的手写笔配备了 Nanotec 提供的DB59系列直流无刷电机。 为了使机器人能够从任何规定位置撤回,两台大电机(轴 1 和轴 2)需要 21 Ncm 的最小转矩,小电机(轴 3)4.5 Ncm:当机器人手臂在 90° 角完全伸展后,将能做到这一点。来源和照片:Mathias Mettauer
“Easy Going”越野滑雪固定器是维也纳 HTBLA Rennweg 的学生们开展的一个项目。这个滑雪固定器采用根据上坡或下坡斜度自动进行步进调节的设计。固定器自动进行调节。如果越野滑雪者选择了手动模式,可按下按钮选择级别。每个固定器都具有电机、电池、微芯片和无线模块。使用了 Nanotec 提供的LSA201S06-A-TDBA-102系列的两个直线步进电机,尺寸为 NEMA8 (20 mm)。这些设备为使用节省空间的线性轴创造了条件。来源和照片:Christopher Muhr
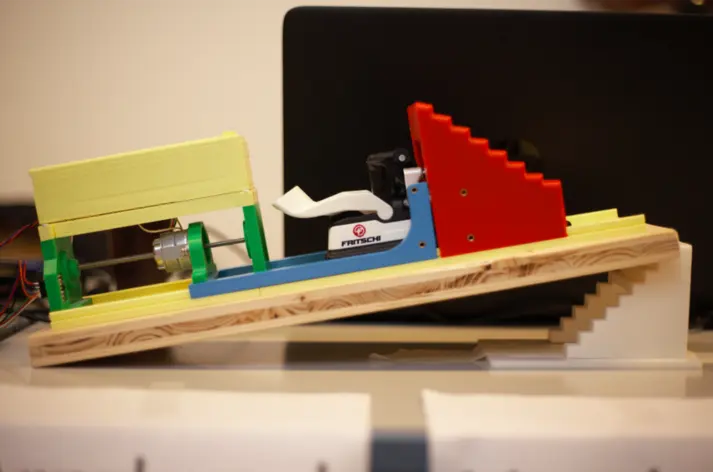
来自维也纳 HTL Rennweg 大学的团队在他们的机器人技术班上开发了一个可以清洁和擦拭黑板 (60 cm x 45 cm) 的 2 轴机器人。学生们在该项目中使用了高转矩步进电机ST5918M3008-A尺寸 NEMA23 以及两台步进电机ST4209L1704-A尺寸 NEMA17,带经济型行星变速箱GPLE40。ST4209L1704-A 负责 X 方向上的传输运动,而第二和第三步进电机负责 Z 轴方向上的运动。来源和照片:Lukas Satzinger
“大学生方程式大赛”宣称的目标是在一年内设计和制造一辆赛车并使其越过欧洲赛道的终点线。自 2012 年以来,TUHH(汉堡-哈尔堡技术大学)的电子技术团队每年都成功参加这场电动赛车的角逐。这个团队由来自各个 TUHH 学位课程的近 60 名学生组成。2017 年,在霍根海姆赛道举办的每年一度的“德国大学生方程式大赛”中,他们在电动汽车参与者中获得第 9 名的佳绩。2017 年新推出的无人驾驶类别要求将现有车辆改装成全自动驾驶车辆。为此,学生们使用 Nanotec 的 DB59S024035 直流无刷电机来旋转转向轴,从而自动操控汽车。它取代了通常由驾驶员使用双手来转动方向盘的操作。电子点火团队在比赛结束后非常高兴,因为他们的自动驾驶赛车在“自主设计奖”中取得世界排名第三的出色成绩。来源和照片:Ole Ramming

经过 13 个月的努力,由比利时鲁汶大学的 21 名学生组成的团队设计了一款新的太阳能汽车 Punch 2,借此他们参加了在 10 月 8 日举办的澳大利亚普利司通世界太阳能挑战赛。为了参加此次比赛,他们从达尔文飞到阿德莱德,直穿澳大利亚内陆,行程长达 3,000 公里。今年的这款太阳能汽车有很多新奇亮点。Punch 2 配备了一个独特的机械四轮转向系统,它由机械分离的前后轮转向器组成。这意味着前轮会在方向盘发生第一个 90° 位移时旋转。当驾驶员继续转动方向盘时,则会继续启动后轮转向。转向动作通过钢缆传递到四个车轮上。为了测试新系统,这个团队决定构建一个转向系统的副本。Nanotec 的直流无刷电机与变速箱配合使用并与方向盘连接,以模拟比赛中的转向运动。转向力使用强力弹簧来模拟,它需要变速箱提供所需的转矩。文字和照片来源:Martijn Schaeken
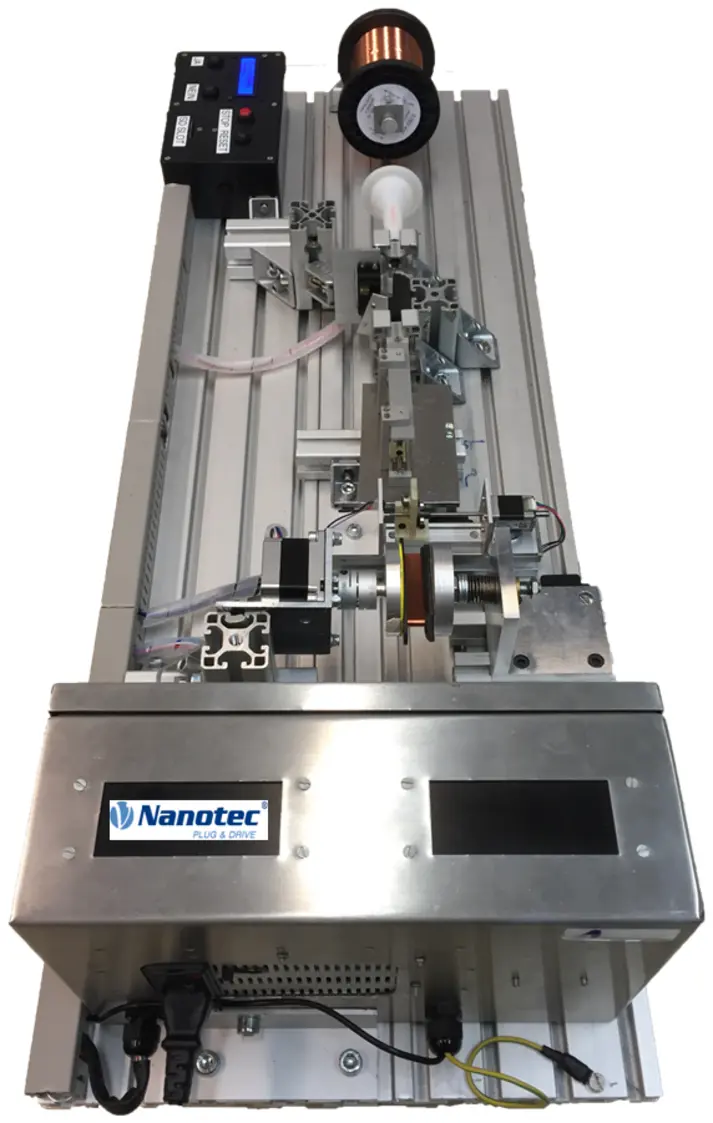
慕尼黑应用科技大学机械电子和精密工程专业的学生为吉他拾音器开发了一台自动绕线机,并在 2016 年夏季学期的“机电一体化”研讨会中亮相。他们开发了一种特殊的弹簧系统,使得漆包线在拾音器线轴上缠绕时不会卡住。为了驱动拾音器的旋转,他们采用了步进电机 ST5918。在 SMCI35 控制器的帮助下,可以在绕线数增加时让驱动电机的速度逐渐增加到某个阈值。然后电机以恒定速度旋转,直到绕线完成。此外,通过外部线性执行器 LS20,使得线材平行于拾音器旋转轴在线轴的整个宽度上连续馈送。

2016 年 5 月 14 日至 5 月 15 日,第三季 Ecorace 挑战赛在比利时布鲁日举行。七个团队使用他们的比例模型参与比赛,争夺最具创新性船舶、最佳全能载货船、最佳全能非载货船和最佳商业计划奖项。最具创新性船舶和最佳全能载货船的奖项都被鲁汶大学的“Galena”获得,这是一艘货船模型,用来运载一吨货物并在内陆航道航行。将来,Galena 应该能够完全自主航行。Nanotec 的 PD4-N5918L4204 被连接到 Nanotec 的变速箱 GPLE60-2S-16,作为这艘船的转向装置。
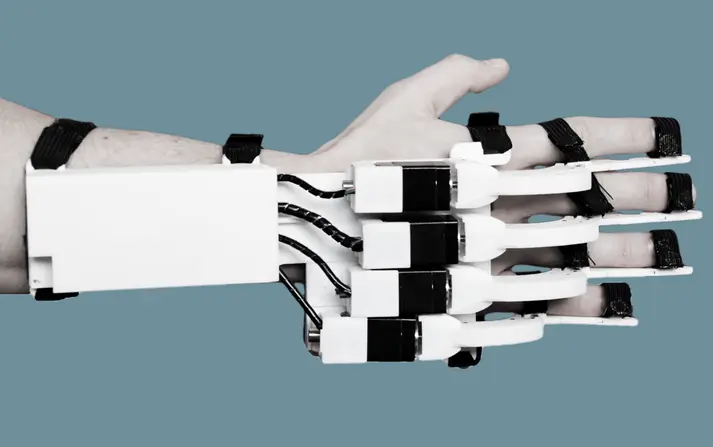
我们祝贺 Dominic Libanio、Christian Schorr 和 Pascal Lindemann 荣获“Jugend Forscht”地区竞赛冠军以及莱茵兰-普法尔茨州创意竞赛第二名。这个得到 Nanotec 电机支持的项目旨在开发一款手部治疗仪器。由于成本和时间因素导致运动疗法无论是在规定上还是在执行上,都无法到达所需的限度,所以手部在接受手术和后续治疗后通常无法达到最佳治疗效果。由此可能造成手指关节的基本运动受限,运动机能敏感性失常。这款手部治疗仪器将为医生和理疗医师提供支持。该仪器为每根手指提供可独立调节的机械机构,这些机械机构由 Nanotec 线性电机驱动。
在柏林经济学院,应用工业电子专业的学生受托开发一款机器人,要求该机器人能够根据定制软件建造任意高度和形状的墙壁。一个由机载 ATmega32 控制的虚拟自动无线运载工具在六个月之内建成。这一运载工具由两个机载 Nanotec 步进电机驱动,每个电机带动一个轴装外铝轮毂,实现精准位置控制。前后两个支撑架在增加该运载工具重量的同时,还能在运载工具行驶过程中来回滑动,从而确保稳定性。前部线性执行器推动一个手臂沿线性导轨上下移动。配备电磁铁的手臂可以提放木块,而木块则用金属板固定并放在预设位置。该运载工具由 12 伏锂聚合物电池供电。借助直观的用户界面,用户可以操控运载工具在基站和建筑工地之间行驶,最终建成高度不同的墙壁。Marc Zechel、Robert Fibich

从 2009 年开始,德国盖尔森基兴市的威斯特伐利亚大学机械工程学院每年都会举行一次应用科学年度竞赛。每个参赛的学生团队要开发出一台机器来完成特定任务。今年,他们接受的挑战是设计和制造用于冠形瓶塞的自动开瓶器,并对其进行编程。在开瓶之后,开瓶器还要将预定数量的饮料自动倒入玻璃杯中。2015 年度竞赛的获胜者是一个四人设计团队,他们选择了 Nanotec 的线性执行器 LS4118S1404-T6x2-75 来执行开瓶动作,而该线性执行器的更快速度和更高可靠性成为了他们获胜的决定性因素!

慕尼黑应用科技大学的机电一体化及精密工程项目模块旨在从项目概念或现有项目来设计完整的产品,其中包括演示和论证过程。2015 年夏季学期的学生设计了一款蠕动泵,每分钟能够恒定输出一升流体。这涉及到编写必要软件、建造泵并把它投入使用 – 而且全部预算要控制在 100 欧元以下。因此,该团队使用慕尼黑应用科技大学的 3D 打印机来生产设备中的大部分部件。蠕动泵使用 Arduino Micro 进行控制,由其负责与 PC 通信、启动电机和评估传感器。电路板在该大学的电子实验室中完成焊接并放入 μC、电源系统的部件和电机驱动器。速度通过一个开孔圆盘监控并使用软件进行评估。为了让用户能够操作泵,该小组使用 C-Sharp 编写了一个前端。Nanotec 步进电机充当了蠕动泵的软件和设计部件之间的接口。

在吉森大学的应用戏剧研究学会,有一个学生项目是重建德国民族传统游戏“肯塔基赛马”。在这个技巧游戏中,玩家要能够熟练操控比赛球来促使其机械马前往终点。与原型不同的是,新版本中的玩家不直接与游戏过程进行互动。相反,参赛者都坐在另外一个由摄像头监控的房间里面。玩家的热情越高,越能激励他的马快速跑向终点。例如,通过叫嚷或拍手,叫的越响、拍的越快,马跑的越快。这些马由 Nanotec 提供的步进电机 PD4-N6018L4204 驱动。这些电机由相同的软件(光线和声音)控制,实现了机械元件和视听媒体的完美结合。

Nanotec Electronic 是奥格斯堡应用科技大学开发的 MALOMAT 项目的支持者之一。这个项目的目的是开发出一台设备,使残疾儿童能够自己在画布上涂鸦。位于科尼格斯不伦的弗里茨-费尔森施泰因豪斯是一所为身体残疾和智力障碍儿童开设的学校。在这里,画画是课堂上的重要内容。但这通常需要大量复杂的过程才能实现,因为孩子们无法自己在普通画布上画画。他们首先会选择一种颜色,并告诉他们的老师要绘制在画布的哪个部分。老师使用画棒,从画布的选定位置向下画出线条。 而借助于 MALOMAT 项目,这些儿童可以自己在画布上画画。经过一些简短的准备工作之后,可以画出三种不同颜色的线条。 这两个程序可以完全由一个或多个孩子控制,从而也可以实现不同的难度。Nanotec 通过提供齿轮电机和控制器来支持该项目。

2014/2015 冬季学期,卡尔斯鲁厄大学机电一体化专业的学生在项目研究中开发了一款曲棍球机器人。该机器人将取代一名玩家,与另一名玩家对战,它能完全自主行动,并根据游戏本身的情况作出决定。球的位置和速度由传感器系统获取,并由电子评估系统进行处理,随后数据被发送到机械控制推进器,使它可以移动到一个特定的位置将球击回。Nanotec 的步进电机用来移动与推进器相连的连接架。ST5918L4508 在该应用中提供恰当的转矩并由 SMCI35 控制器驱动。来源和照片:Jakob Bokemeyer、Sergej Krohmer、Tobias Sperling、Urs Wetzel、Simon Wörner、卡尔斯鲁厄应用科学大学
